Soal No. 5 (a)
A.
Rangkaian H-bridge dengan 4 buah transistor
H-bridge merupakan sebuah perangkat keras
berupa rangkaian yang berfungsi untuk menggerakkan motor. Rangkaian ini diberi
nama H-bridge karena bentuk
rangkaiannya yang menyerupai huruf H seperti pada gambar berikut.

Pada saat MOSFET A dan MOSFET D on sedangkan MOSFET B dan MOSFET C off,
maka sisi kiri dari gambar motor akan terhubung dengan kutub positif dari catu daya, sedangkan sisi sebelah
kanan motor akan terhubung dengan kutub negatif dari catu daya sehingga motor akan bergerak searah jarum jam, dijelaskan pada gambar berikut.

Sebaliknya,
jika MOSFET B dan MOSFET C on sedangkan MOSFET A dan MOSFET D off, maka sisi
kanan motor akan terhubung dengan kutub positif dari catu daya, sedangkan sisi
kiri motor akan terhubung dengan kutub negatif dari catu daya. Maka motor akan
bergerak berlawanan arah jarum jam, dijelaskan pada gambar berikut.

B.
Motor DC dengan menggunakan IC L293D yang dihubungkan dengan
mikrokontroller.
IC
L293D adalah IC yang didesain khusus sebagai driver motor DC dan dapat
dikendalikan dengan rangkaian TTL maupun mikrokontroller. Motor DC yang
dikontrol dengan IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan
positif karena didalam driver L293D sistem driver uang digunakan adalah totem
pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang
memiliki kemampuan mengalirkan arus 1A tiap drivernya.
Bentuk Pin Driver Motor DC IC
L293D :

Penerapan Cara Kerja Rangkaian Motor DC dengan menggunakan H-bridge
a.
Rangkaian motor DC 5V memutar searah jarum jam (CW).

Pada saat MOSFET A dan MOSFET D on sedangkan MOSFET B dan MOSFET C off,
maka sisi kiri dari gambar motor akan terhubung dengan kutub positif dari catu daya, sedangkan sisi sebelah
kanan motor akan terhubung dengan kutub negatif dari catu daya sehingga motor akan bergerak searah jarum jam.
b. Rangkaian motor DC 5V memutar berlawanan arah jarum jam
(CCW).

Pada
saat MOSFET B dan MOSFET C on sedangkan MOSFET A dan MOSFET D off, maka sisi
kanan motor akan terhubung dengan kutub positif dari catu daya, sedangkan sisi
kiri motor akan terhubung dengan kutub negatif dari catu daya. Maka motor akan
bergerak berlawanan arah jarum jam.
Penerapan Cara Kerja Rangkaian
Motor DC dengan menggunakan IC L293D
a. Rangkaian motor DC 5V memutar searah jarum jam (CW).

Dari
gambar diatas pin IN1 dan IN2 digunakan sebagai input logika untuk mengatur
putaran motor DC secara tepat. Sedangkan untuk pin EN1 berfungsi untuk
meng-ON/OFF kan motor DC. Pada saat pin IN1(A) diberi logika LOW (0) dan pin IN2
(B) diberi logika HIGH (1), maka motor DC akan bergerak berputar searah jarum
jam (CW).
b. Rangkaian motor DC 5V memutar berlawanan arah jarum jam (CCW).

Dari
gambar diatas pin IN1 dan IN2 digunakan sebagai input logika untuk mengatur
putaran motor DC secara tepat. Sedangkan untuk pin EN1 berfungsi untuk
meng-ON/OFF kan motor DC. Pada saat pin IN1(A) diberi logika HIGH (1) dan pin
IN2 (B) diberi logika LOW (0), maka motor DC akan bergerak berputar berlawanan
arah jarum jam (CCW).
Soal No. 5 (b)
Penerapan Cara Kerja Motor Stepper 5V mode half step dan full step CW dan
CCW
a a. Rangkaian motor stepper 5V mode half step CW dan CCW.

(Gambar rangkaian motor stepper
5V mode half step CW)

(Gambar tabel nilai logika untuk sudut mode
half step CW)
Untuk
mendapatkan motor stepper 5V dapat diatur mode half step yang berputar searah
jarum jam (CW) lakukanlah dengan membuka aplikasi proteus 8 profesional,
kemudian rangkai rangkaian motor stepper bipolar 5V sesuai pada gambar diatas.
Setelah itu lakukan simulasi dengan menggunakan bilangan logika sebanyak 8 kali
atau 8 step untuk mendapatkan sudut satu putaran penuh yang sesuai dengan yang tertera
pada gambar tabel diatas.

(Gambar rangkaian motor stepper
5V mode half step CCW)

(Gambar tabel nilai logika
untuk sudut mode half step CCW)
Untuk
mendapatkan motor stepper 5V dapat diatur mode half step yang berputar
berlawanan dengan arah jarum jam (CCW) lakukanlah dengan membuka aplikasi
proteus 8 profesional, kemudian rangkai rangkaian motor stepper bipolar 5V
sesuai pada gambar diatas. Setelah itu lakukan simulasi dengan menggunakan bilangan
logika sebanyak 8 kali atau 8 step untuk mendapatkan sudut satu putaran penuh
yang sesuai dengan yang tertera pada gambar tabel diatas.
b. Rangkaian motor stepper bipolar 5V full step CW dan CCW.

(Gambar rangkaian motor stepper
5V mode full step CW)
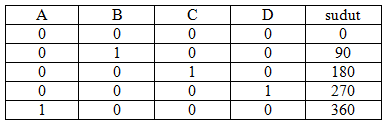
(Gambar tabel nilai logika
untuk sudut mode full step CW)
Untuk
mendapatkan motor stepper 5V dapat diatur mode full step yang berputar searah
jarum jam (CW) lakukanlah dengan membuka aplikasi proteus 8 profesional,
kemudian rangkai rangkaian motor stepper bipolar 5V sesuai pada gambar diatas.
Setelah itu lakukan simulasi dengan menggunakan bilangan logika sebanyak 4 kali
atau 4 step untuk mendapatkan sudut satu putaran penuh yang sesuai dengan yang tertera
pada gambar tabel diatas.

(Gambar rangkaian motor stepper
5V mode full step CCW)

(Gambar tabel nilai logika
untuk sudut mode full step CCW)
Untuk
mendapatkan motor stepper 5V dapat diatur mode full step yang berputar
berlawanan dengan arah jarum jam (CCW) lakukanlah dengan membuka aplikasi
proteus 8 profesional, kemudian rangkai rangkaian motor stepper bipolar 5V
sesuai pada gambar diatas. Setelah itu lakukan simulasi dengan menggunakan bilangan
logika sebanyak 4 kali atau 4 step untuk mendapatkan sudut satu putaran penuh
yang sesuai dengan yang tertera pada gambar tabel diatas.